🌐 Introduction
EtherCAT (Ethernet for Control Automation Technology) est un protocole Ethernet industriel haute performance et en temps réel largement adopté dans l'automatisation, la robotique, les machines CNC et les applications de usine intelligente. Avec un timing déterministe, une latence de communication ultra-faible et une synchronisation sous le microseconde, EtherCAT est devenu une technologie fondamentale pour la commande de mouvement moderne et les systèmes industriels à haute vitesse.
Ce guide fournit une explication professionnelle, au niveau ingénieur, des principes de fonctionnement d'EtherCAT, des mécanismes de synchronisation, des options de topologie, des normes de sécurité et des considérations de couche physique.
🌐 Limites de l'Ethernet Traditionnel dans l'Automatisation Industrielle
L'Ethernet standard a été conçu à l'origine pour les environnements de bureau - pas pour le contrôle industriel synchrone et déterministe. Les principales limites incluent :
Communication non déterministe causée par l'arbitrage CSMA/CD
Surcharge de protocole élevée due au traitement multi-couche
High jitter inadaptée aux boucles de commande de mouvement
Mauvaise évolutivité lorsque de nombreux dispositifs sont connectés dans un système critique en temps
Les applications industrielles telles que la robotique et la servocommande multi-axes nécessitent souvent des cycles de moins de 100 µs et un jitter mesuré en centaines de nanosecondes ou moins. L'Ethernet traditionnel ne peut pas répondre à ces contraintes.
EtherCAT répond directement à ces défis en temps réel avec un modèle de communication accéléré par matériel spécialement conçu pour l'automatisation haute performance.
🌐 Principe Fondamental : Traitement des Trames en Vol (FMMU)
Le concept fondamental qui distingue EtherCAT des autres systèmes Ethernet industriels est sa méthode de traitement des trames Ethernet en vol, rendu possible par une unité matérielle connue sous le nom de FMMU (Fieldbus Memory Management Unit).
● Comment EtherCAT Traite les Données
Transmission d'une Seule Trame: Le maître EtherCAT envoie une seule trame Ethernet standard contenant des datagrammes pour tous les dispositifs esclaves.
Traitement Matériel en Vol: Chaque esclave extrait ses données de sortie et insère directement ses données d'entrée dans le cadre à mesure qu'il passe. Le délai de traitement typique par esclave est < 1 µs.
Boucle de trame: Le cadre modifié retourne au maître avec les données d'entrée consolidées de tous les esclaves.
● Caractéristiques de performance
Latence déterministe indépendante du nombre de nœuds
Utilisation de la bande passante > 90%
Exemple de performance :
1000 points d'E/S numériques en ~30 µs
100 axes servo en ~100 µs
Cette efficacité fait d'EtherCAT l'un des réseaux industriels les plus rapides disponibles aujourd'hui.
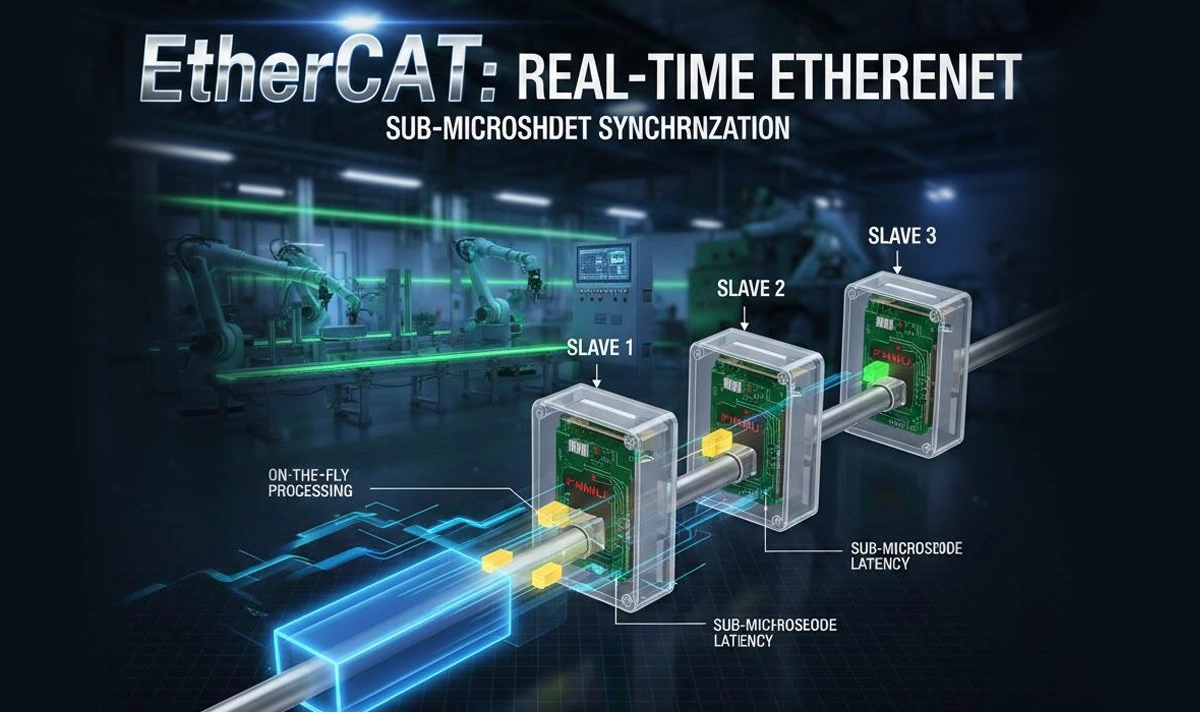
🌐 Horloges distribuées (DC) : Synchronisation sous-microseconde
Une synchronisation précise est essentielle pour la robotique coordonnée, l'usinage CNC et la servocommande multi-axes. EtherCAT atteint une synchronisation meilleure que 100 ns en utilisant un mécanisme de distribution d'horloge décentralisé.
▷ Principe de fonctionnement des horloges distribuées
Sélection de l'horloge de référence: Le premier esclave capable de DC agit comme horloge de référence.
Capture de l'horodatage: Chaque esclave mesure les temps d'arrivée et de départ du cadre pour déterminer le délai de propagation.
Compensation automatique de la dérive: Le maître calcule les décalages et distribue les valeurs de correction à tous les esclaves.
▷ Avantages de la synchronisation DC
Alignement de phase au niveau nanoseconde sur des centaines d'appareils
Profils de mouvement extrêmement stables pour la robotique et les systèmes de positionnement
Acquisition de données simultanée précise
Le système DC fournit un timing réseau déterministe et précis sans nécessiter une horloge maître centralisée.
🌐 Topologie réseau flexible et redondance
EtherCAT prend en charge une large gamme de topologies de câblage sans nécessiter des commutateurs Ethernet.
Topologies prises en charge
Ligne (la plus courante)
Arbre / Branche / Ligne dérivée
Étoile (en utilisant des jonctions EtherCAT)
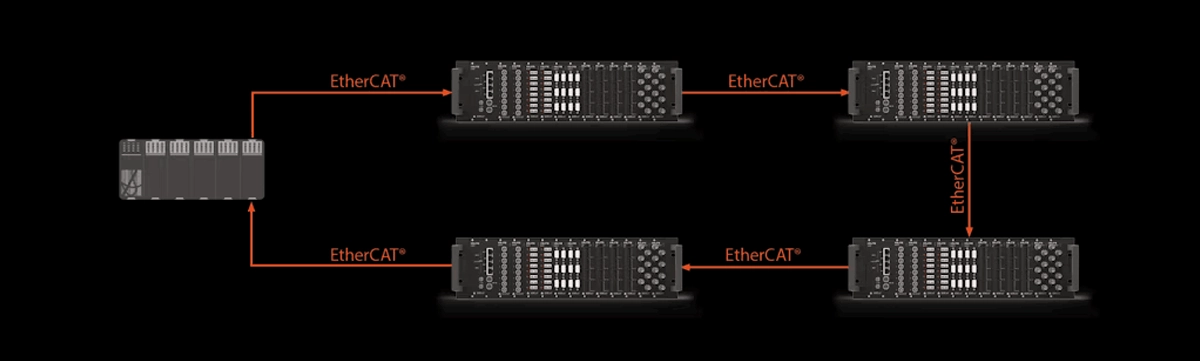
Anneau (redundance complète des médias)
Tolérance aux pannes
Dans une structure en anneau, si un câble se rompt :
Le cadre change automatiquement de direction
La communication avec le reste du réseau continue sans interruption
Cela assure une haute disponibilité dans les environnements industriels exigeants.
🌐 Sécurité fonctionnelle sur EtherCAT (FSoE)
EtherCAT intègre la sécurité fonctionnelle au sein du même réseau en utilisant FSoE, un protocole certifié TÜV prenant en charge le SIL 3 (IEC 61508).
Exemples de fonctions de sécurité :
Arrêt d'urgence
Arrêt sécurisé du couple (STO)
Surveillance sécurisée de la vitesse (SSM)
Surveillance sécurisée de position ou de direction limitée
En intégrant les données de sécurité à l'intérieur des trames standard EtherCAT, FSoE élimine la nécessité d'un bus de sécurité séparé, réduisant les coûts et la complexité du câblage.
🌐 Rôle des composants de la couche physique dans les performances d'EtherCAT
Bien que les performances d'EtherCAT soient pilotées par le protocole, son intégrité en temps réel dépend fortement de la qualité du matériel de la couche physique.
Les exigences clés incluent :
Une haute intégrité du signal dans des conditions EMI difficiles
Excellent rejet du bruit de mode commun isolation galvanique fiable basée sur des transformateurs
Connecteurs magnétiques RJ45 de qualité industrielle
Des composants magnétiques et PHY de haute qualité permettent aux systèmes EtherCAT de maintenir une synchronisation au niveau microseconde et nanoseconde, même dans des environnements électriquement bruyants. 🌐 Adoption mondiale et domaines d'application
infrastructure.
🌐 Conclusion
EtherCAT est l'une des technologies Industrial Ethernet à la croissance la plus rapide dans le monde, soutenue par le groupe de technologie EtherCAT (ETG). Ses hautes performances et son architecture ouverte favorisent un usage répandu dans :
L'équipement semi-conducteur
Les systèmes de robotique et d'automatisation
Les machines CNC et l'usinage de haute précision
Les machines d'emballage
Les éoliennes et les systèmes d'énergie renouvelable
Usine intelligente / Industrie 4.0 infrastructure
Sa scalabilité, son faible coût et sa capacité en temps réel ont fait d'EtherCAT un standard mondial d'automatisation.
🌐 Résumé des avantages techniques
Feature | Avantage technique | Impact sur le système de contrôle |
|---|---|---|
Traitement en vol | Élimine la charge du protocole | Déterministe, latence ultra-basse |
Horloges distribuées | Synchronisation <100 ns | Contrôle multi-axes de haute précision |
Topologies flexibles | Supporte en ligne, en arbre, en étoile, en anneau | Simplification du câblage, coûts réduits |
Intégration FSoE | Sécurité fonctionnelle certifiée SIL3 | Réseau unifié de sécurité + contrôle |
🌐 Conclusion
EtherCAT offre des performances en temps réel de premier plan grâce à une communication déterministe, une utilisation efficace de la bande passante et une synchronisation au niveau nanoseconde. Ses topologies flexibles, sa sécurité fonctionnelle intégrée et ses exigences robustes pour la couche physique en font une technologie fondamentale pour l'automatisation industrielle de prochaine génération.
Pour les ingénieurs qui développent des systèmes de contrôle de mouvement, de robotique, de CNC ou d'automatisation de haute performance, EtherCAT offre un équilibre inégalé de vitesse, de fiabilité et de scalabilité.